



Lorsque le LST est soumis à un vent turbulent ou lors d’une phase de pointé, les modes de vibration de la structure porteuse de la caméra peuvent être excités. Ces vibrations provoquent un déplacement de la caméra par rapport à sa position nominale, retardant la prise de données (voire l’empêchant totalement en cas de vent trop fort ou trop turbulent). L’amortissement utilisé pour cette étude est appelé « Integral Force Feedback » (IFF). Pour le mettre en œuvre, il est nécessaire d’intégrer à la structure à amortir un actionneur combiné à un capteur de force. Cette technique s’adapte parfaitement aux structures câblées des télescopes de CTA et réduit significativement les vibrations. Cela permet également d’améliorer la précision du pointé et donc la résolution angulaire des télescopes. Une simulation a été réalisée afin de valider les différentes procédures de mise en œuvre de l’IFF.
En 2010, un démonstrateur à échelle réduite a été réalisé. Il s’agissait d’une structure haubanée supportant une fausse caméra et incluant les capteurs, les actionneurs, ainsi que l’électronique permettant de les mettre en œuvre. Tous les tests ont été accomplis avec succès : les mesures montrent que nos algorithmes permettent en quelques secondes de stabiliser la caméra.
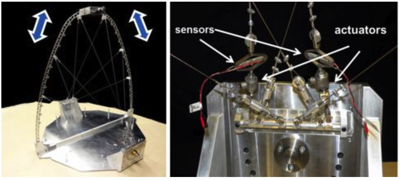 Maquette d’arche haubanée et stabilisée par le système mécatronique de capteurs et d’actionneurs de forces.
Maquette d’arche haubanée et stabilisée par le système mécatronique de capteurs et d’actionneurs de forces.
L’expérience acquise dans la réalisation du système de débarquement de H.E.S.S.-2 nous a également permis d’obtenir la responsabilité du projet de mécatronique qui contrôle et commande les télescopes LST de CTA. Le futur « drive system » (2 axes de rotation) devra répondre à différentes exigences :
- Synchronisation des axes à plusieurs moteurs : ce type de fonctionnement a été mis en œuvre sur le projet H.E.S.S. (roues sur rails), néanmoins les jeux mécaniques seront moindres dans le cas du télescope LST et son comportement reste à être étudié. Des contraintes d’ajustement pourront être mises en place.
- Sécurisation des mouvements via l’intégration d’un automate : solution qui n’a jamais été mise en œuvre au LAPP.
- Régénération d’énergie sur le réseau électrique lorsqu’un moteur devient générateur de courant : un aspect qui est très important au sein du projet CTA, compte-tenu des puissances mises en jeu et du déploiement de l’expérience sur un site désertique.
- Optimisation des trajectoires : le télescope étant un système inertiel, un déplacement donné peut être réalisé suivant différentes combinaisons de trajectoires et un compromis doit être trouvé entre puissance moteurs et temps de déplacement.
Les 4 télescopes LST sont à intégrer au sein d’une architecture de grande envergure nommée array control au sein de laquelle devront cohabiter tous les télescopes, mais aussi les stations météo, les systèmes de calibration, le pilotage des miroirs... L’équipe a établi l’architecture globale de contrôle et développe l’instrumentation d’automates pour le contrôle des moteurs du LST.
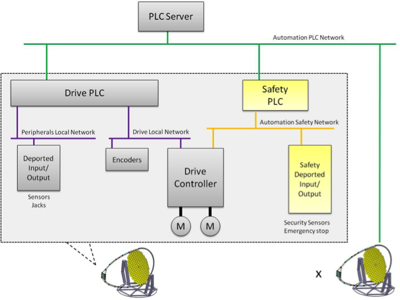 Architecture globale d’automates destinée au pilotage des moteurs du LST, à la sécurité globale et au contrôle du réseau de plusieurs télescopes.
Architecture globale d’automates destinée au pilotage des moteurs du LST, à la sécurité globale et au contrôle du réseau de plusieurs télescopes.