toto
L’expérience HESS, implantée à 1800 m d’altitude sur un plateau désertique de
Namibie (Afrique australe), est une collaboration internationale de plus de 100
scientifiques et ingénieurs qui étudie les phénomènes les plus violents de
l’Univers en utilisant cinq télescopes dont quatre de 13 m de diamètre et un de
28m qui constituent le détecteur de gammas cosmiques de très haute énergie le
plus sensible au monde.
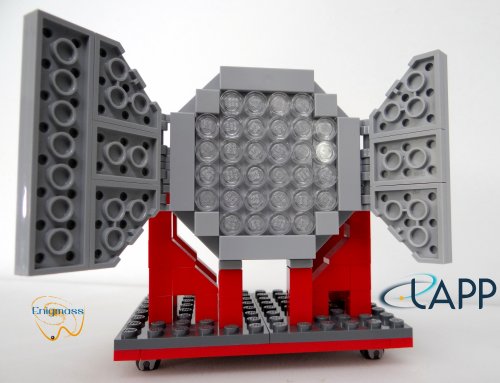
La caméra de H.E.S.S.II sur un support pour la maintenance.
Ce modèle représente la caméra du grand télescope du réseau HESS. Pour réaliser
cette camera il a fallut 127 pièces. Le support (partie rouge en bas) à aussi été
réalisé en LEGO. Dans la réalité, il repose sur des rails pour déplacé la caméra
lors du chargement et du déchargement.
La vrai caméra fait 227 cm de large x 240 cm de haut x 184 cm de long pour un
poids de 3 tonnes. Celle en LEGO est beaucoup plus petite et légère.

Lorsque la caméra est débarquée du télescope, elle est stockée des chariots,
également conçus et réalisés au LAPP. Une fausse caméra vient la remplacer
dans le télescope pour assurer l’équilibre du système.
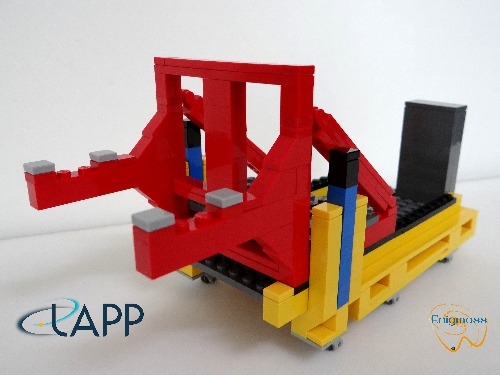
Mini système de débarquent de la caméra H.E.S.S. II
Pourquoi débarquer la camera ?
La camera est 2.5 fois plus volumineuse que celle de HESS-I. Sa protection dans
un abri toujours fixée au télescope n’est plus possible. Pour la protéger de la
pluie et des poussières soulevées par le vent, la caméra doit pouvoir être
débarquée du télescope. Sa manutention pour des opérations de maintenance et
d’étalonnage est ainsi facilitée.
Abris de la caméra H.E.S.S. II
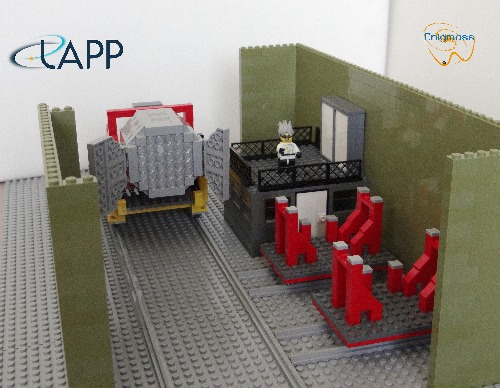
L’abris de la caméra sert ainsi à la protéger mais aussi pour sa maintenance. Il
contient aussi les ordinateurs permettant de contrôler le système de
débarquement.
rendu 3D du système de débarquement en LEGO Technic
Ce modèle représente le système de débarquement de la camera de H.E.S.S.II. Fait
en LEGO Technic, ce modèle reproduit fidèlement les mouvements du réel system.
Le mouvement du chariot se décompose en 4 phases :
1 Translation de la base
2 Rotation du plateau
3 Translation de la fourche
4 Levage de la fourche
![]()
